要旨
Owing to population and economic growth, vehicular traffic jam is becoming a serious problem in some developing countries. Although modeling of traffic flow started in the 1930s, conventional traffic models do not sufficiently explain the traffic dynamics of them.
In some of these countries, characteristic traffic is observed as shown in Fig. 1. The first characteristic is “heterogeneity” (a). Traffic comprises many types of vehicles, i.e., motorcycles, three-wheelers, etc. The second one is “weak lane-discipline” (b). Even if there are traffic lanes on a road, drivers do not necessarily follow the lanes. We call traffic with these characteristics two-dimensional (2D) mixed traffic. Besides, because of “the order of vehicles” (c), the dynamics of mixed traffic are different from those which are simulated by previous traffic models for uniform traffic comprising (almost) one type of vehicle.
In this presentation, we introduce our researches on (a), (b), and (c). As an analysis of (a), we introduce feature extraction of driving characteristics using a decision tree analysis for time series data shown in Fig. 2. Regarding (b), we investigated the distribution of drivers’ response time in 2D traffic. The results of an experiment implied that 2D traffic is more likely to cause traffic jams than estimated by a conventional model. For (c), we searched vehicle combinations frequently observed on an arterial road in Mumbai, India. As a result, it was quantitatively indicated that two-wheelers tended to make groups as generally believed.
 Fig. 1 Traffic in Mumbai, India.
Fig. 1 Traffic in Mumbai, India.
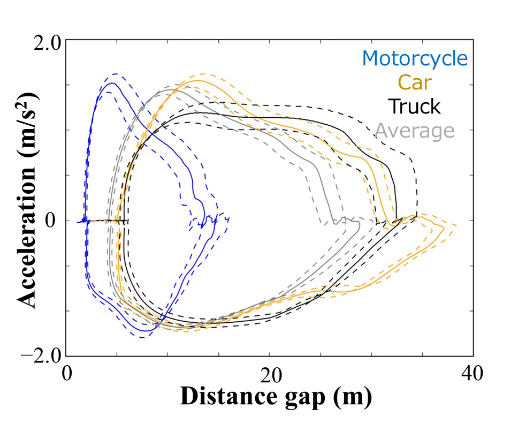 Fig. 2 Time evolution of the relation between the acceleration and distance gap in stop-and-go driving.
Fig. 2 Time evolution of the relation between the acceleration and distance gap in stop-and-go driving.
印刷用PDFファイル(179 390 バイト) | ページ先頭へもどる
2020年1月14日作成