ZOOM Meeting ID: 215-314-2974
要旨
Animals’ collective behaviors are characterized by the dynamics of individuals and the interaction among them. Even though each of individuals interacts with its local neighbors based on some local interaction rules, their group shows interesting behaviors as a whole. Such collective behaviors can be seen as distributed cooperative systems, which include not only animal groups but also artificial systems consisting of a large number of controllers or artificial agents (robots/computers controlled by software).
Once we successfully understand the behavior of animals (e.g., fish schools) through the detailed modeling of a group, i.e., how information propagates through the individuals in the group, one may be able to predict and even control the entire group behavior by injecting external inputs from outside to a small number of constituent individuals. On the other hand, once appropriate interaction rules are introduced among artificial agents, one may design robust and effective distributed systems of robots and computers. The idea of controlling a distributed collective behavior is now attracting researchers in a variety of fields including social science, complex networks, and control theory.
In this talk, I will introduce some of our preliminary attempts on the analysis and control of distributed cooperative systems, including mobile robots, fish schools, and community-based energy management systems.
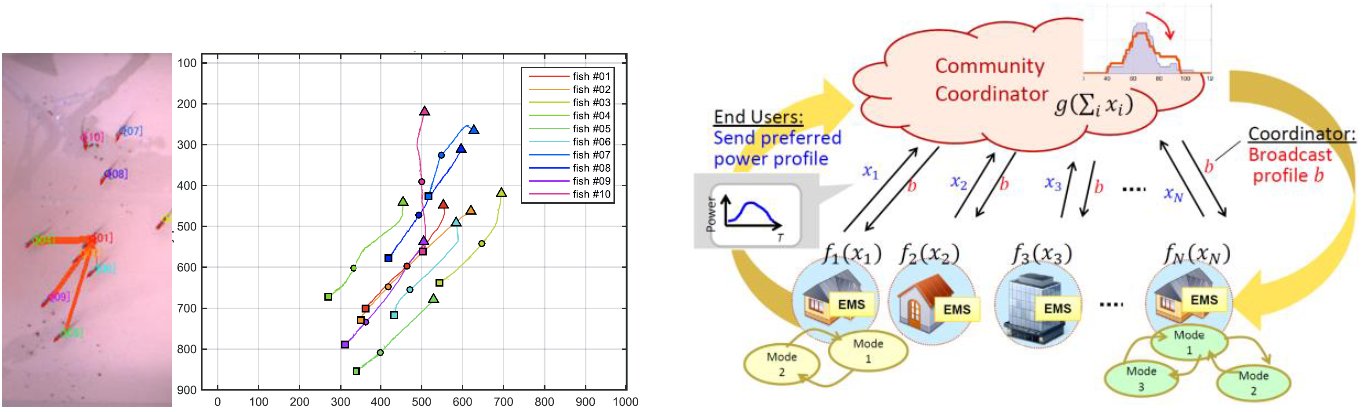 Fig. 1 Left) Estimated interaction topology and tracked trajectories of a fish school.
Fig. 1 Left) Estimated interaction topology and tracked trajectories of a fish school.
Right) Distributed optimization for a community-based energy management.
印刷用PDFファイル(146 601 バイト) | ページ先頭へもどる
2019年1月15日作成